Kategorien durchsuchen
Entdecken
Fiverr Pro
Deutsch
$
USD
Level 1
Hat bestimmte Leistungskriterien erfüllt und zeigt großes Potenzial auf dem Marktplatz.
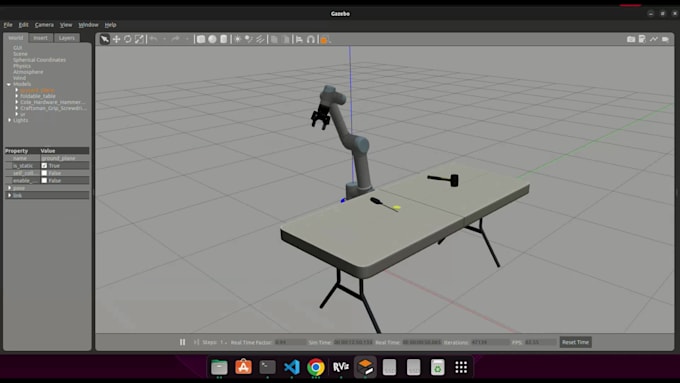
Ich helfe dir dabei, Roboterarme mit Bewegungsplanung und Steuerung in ROS2 Gazebo zu simulieren. Ich liefere maßgeschneiderte Lösungen, die genau auf deine Anforderungen abgestimmt sind.
Warum du mich wählen solltest?