Kategorien durchsuchen
Entdecken
Fiverr Pro
Deutsch
$
USD
Konstruktionsingenieur-Fertigung
Level 2
Hat hohe Leistungskriterien erfüllt und verfügt über eine nachgewiesene Erfolgsbilanz bei der Erfüllung von Kundenerwartungen.
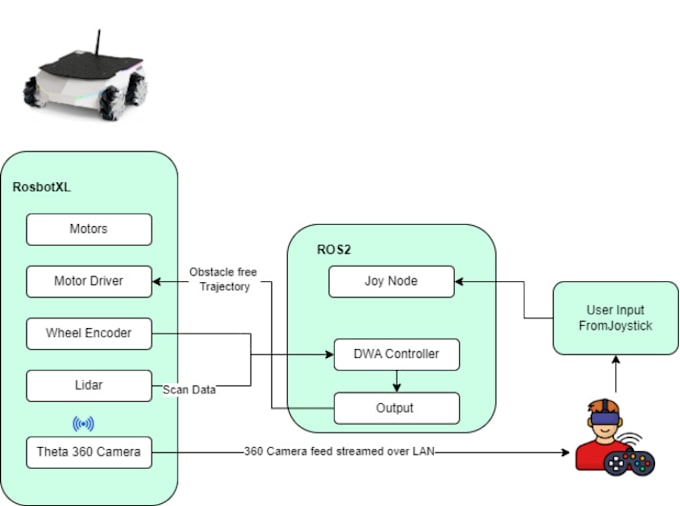
Baust du einen mobilen Roboter oder ein autonomes System und brauchst fachkundige Unterstützung mit ROS 2? Du bist hier genau richtig! Ich spezialisiere mich auf die Entwicklung fortschrittlicher Robotikprojekte mit ROS 2, mit Fokus auf:
Was ich anbiete:
Navigation Stack (Nav2)
Willst du, dass dein Roboter autonom durch Karten navigiert, Hindernisse umgeht oder Wegpunkte verfolgt? Ich konfiguriere und optimiere den vollständigen Nav2-Stack, inklusive Mapping, Lokalisierung, Pfadplanung und Verhaltensbäumen.
Robotkinematik
Ich implementiere und teste Vorwärts- und Inverse Kinematik für differential-, omnidirektionale oder individuelle mobile Basen.
Individuelle Python-Controller
Vom Schreiben von ROS 2-Knoten in Python bis hin zum Erstellen maßgeschneiderter Controller für Bewegungsplanung oder Sensorsysteme – ich passe Lösungen an deine einzigartigen Roboterbedürfnisse an.
Simulation (Gazebo, RViz)
Teste deinen Roboter in der Simulation, bevor du in die reale Welt gehst. Ich unterstütze Gazebo/Ignition, RViz2 und mehr.
Lass uns deinen Roboter gemeinsam bauen!
Sende mir eine Nachricht, bevor du eine Bestellung aufgibst, damit ich deine Bedürfnisse verstehe und die beste Lösung liefern kann.
Viele Grüße,
Syed Huzaifa




Plattform:
Raspberry Pi
Sensoren:
Beschleunigungsmesser
•
Kamera
•
Lidar
•
Position
•
Standort
Expertise:
Mikrocontroller
•
IoT
•
ROS
•
AI
•
Programmierung