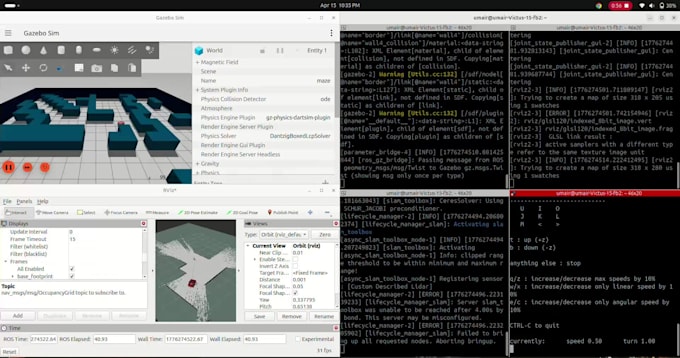
Stelle zuverlässige, autonome Navigation auf deiner mobilen Plattform bereit. Ich spezialisiere mich auf die Konfiguration, Feinabstimmung und Fehlerbehebung des ROS 2 Navigation Stack (Nav2) und der SLAM-Pipelines, um eine robuste Lokalisierung und eine reibungslose Pfadplanung zu gewährleisten.
Technischer Umfang:
- Kartierung & SLAM: Konfiguration des SLAM Toolbox oder Cartographer für die Erstellung hochauflösender 2D-Belegungsgitter.
- Lokalisierungsoptimierung: Feinabstimmung der AMCL (Adaptive Monte Carlo Localization)-Parameter, um Partikeldispersion und Drift zu verhindern.
- Kostenkarten-Konfiguration: Feinabstimmung der globalen und lokalen Kostenkarten, Inflationsradien und Hinderschichten für eine sichere Kollisionsvermeidung.
- Pfadplanung & Steuerung: Anpassung des Behavior Tree zusammen mit individuellen Konfigurationen für Planer und Controller (Dijkstra, DWA oder TEB Local Planner).
Kompatibel mit ROS 2 Humble und Jazzy Setups. Bitte stelle vor Beginn deine URDF- oder Gazebo-Umgebungsdetails bereit.