Kategorien durchsuchen
Entdecken
Fiverr Pro
Deutsch
$
USD
Das Böse mit Gutem überwinden ist gut, dem Bösen mit Bösem widerstehen ist böse
Level 1
Hat bestimmte Leistungskriterien erfüllt und zeigt großes Potenzial auf dem Marktplatz.
ROS ist in der Roboterindustrie weit verbreitet. Für die Verwendung Ihres maßgeschneiderten Roboters ist die Erstellung eines ROS-Pakets erforderlich.
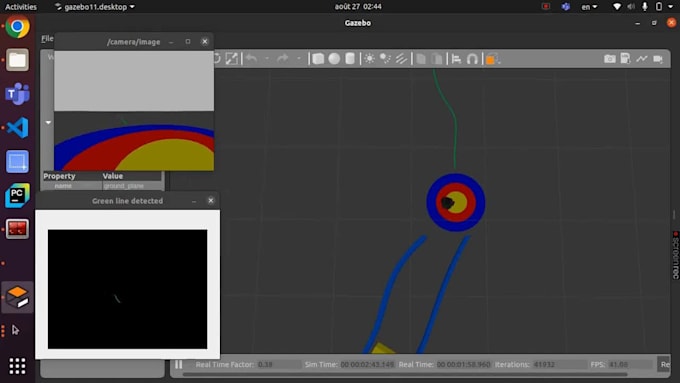
Hier erstelle ich ein ROS-Paket für Ihren Roboter, das entweder lokalisiert oder manipuliert werden kann. Ich werde die URDF- Datei verwenden, um den Roboter zu modellieren und auf Gazebo zu visualisieren.
Spezifikationen des kundenspezifischen Roboters sind vom Käufer erforderlich.
Sie können über ein professionelles ROS-Paket nachdenken, das alle Controller und Gazebo-Plugins für Laserscan, Kamera, gemeinsame Controller und auch eine Karte für SLAM enthält.
Ich werde Ihre ROS-Simulationen von einfachen Turtlesim-Simulationen bis hin zu fortgeschrittenen Level-Simulationen durchführen.