Kategorien durchsuchen
Entdecken
Fiverr Pro
Deutsch
$
USD


Automatische Übersetzung
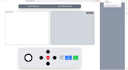
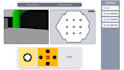
Ich werde eine React-basierte Robotik-Websteuerungs-Benutzeroberfläche für ROS2-basierte Roboterprojekte, Prototypen, Hochschulprojekte und Simulationsdashboards entwickeln.
Dieses Gig konzentriert sich auf den Aufbau eines sauberen Frontend-Dashboard-UI, das auf deine Einrichtung für ROS2/rosbridge-Integration vorbereitet ist.
Was ich bieten kann:
- Robotik-Steuerungs-Dashboard-UI
- Vorwärts-, Rückwärts-, Links-, Rechts- und Stopp-Buttons
- ROS-Verbindungsstatusbereich
- Kamerafeed-Bereich oder Platzhalter
- Kartenbereich oder Platzhalter
- Gespeicherte Karten-Panel
- Responsives Dashboard-Layout
- Sauberer React-Quellcode
- Einfache UI-Verbesserungen für bestehende Robotik-Dashboards
Wichtiger Hinweis:
Dieses Gig ist hauptsächlich für das Frontend-UI des Dashboards und eine integrationsbereite Struktur. Die vollständige ROS2-, Kamera-, Karten- oder Robot-Hardware-Integration hängt von deiner bestehenden Einrichtung und Paketwahl ab.
Bitte schreibe mir vor der Bestellung, damit ich dein Projekt genau verstehen kann.
Robotics Software Engineer
Sprachen
Automatische Übersetzung
Automatische Übersetzung
Kannst du dieses Dashboard mit ROS2 verbinden?
Ich kann das Dashboard integrationsbereit machen und bei der Verbindung mit ROS2 oder rosbridge helfen, abhängig von deiner bestehenden Einrichtung.
Ist das ein vollständiges funktionierendes Robotersystem?
Nein, dieses Gig konzentriert sich hauptsächlich auf die React-basierte Robotik-UI. Die vollständige Hardware-, Kamera- oder Kartenintegration hängt von deiner Einrichtung ab.
Kannst du mein bestehendes Robotik-Dashboard verbessern?
Ja, ich kann die UI, das Layout, die Responsivität, die Steuerungen und das Gesamtdesign des Dashboards verbessern.
Bekomme ich den Quellcode?
Ja, Quellcode ist im jeweiligen Paket enthalten.


